TRASDUTTORE DI POSIZIONE ROTORICA AD EFFETTO HALL
Il sensore logico ad effetto Hall è un interruttore miniaturizzato di prossimità a semiconduttore, pilotato da un magnete, in grado di funzionare fino a 120°C. Il formato proposto è di tipo a minitransistor a tre reofori assiali, attivato dal polo Sud di un magnete permanente affacciato ad una sua predefinita superficie (volume del sensore 10mm³; distanza di commutazione 2mm; uscita bassa con induzione magnetica 30 mT). Il Polo sud è quello di ciascun magnete rotorico del motore o del trasduttore di velocità contraddistinto dallo stesso numero di poli del motore, a seconda dello statore in cui i tre sensori di Hall sono collocati. Lo sfasamento tra ogni sensore è di 120° elettrici, ossia di un angolo meccanico m=120°/cp (coppie polari del motore) o relativi multipli, in relazione ad ingombri meccanici e/o lunghezza predefinita dei cavetti di connessione. La risoluzione ottenibile è bassa, quindi questa soluzione è da adottarsi solamente quando la precisione di posizionamento necessaria è molto relativa.
Resolver
Il resolver è un trasduttore rotante con due avvolgimenti statorici, sfasati tra loro di 90° elettrici, ed uno rotorico. Eccitando l’avvolgimento rotorico con una tensione alternata, in un avvolgimento statorico si induce una tensione di ampiezza proporzionale al seno e nell’altro proporzionale al coseno dell’angolo di rotazione del rotore rispetto allo statore. L’elaborazione elettronica di seno e coseno permette di ricavare l’angolo rotorico istante per istante, e conseguentemente la velocità angolare del motore. Un errore nella determinazione di queste due grandezze, derivante dalla sconnessione di uno o più cavetti del resolver, si tradurrebbe in uno di commutazione delle fasi del motore: il convertitore di potenza incorpora pertanto un circuito di protezione che ne blocca immediatamente il funzionamento nel caso si verifichi tale sconnessione. Costruttivamente il resolver è disponibile sia con albero sporgente che cavo; in entrambi i casi le spazzole d’adduzione della corrente rotorica sono sostituite da un’addizionale coppia di avvolgimenti di rapporto 1:1 (l’induttore è sullo statore e l’indotto sul rotore) denominata “trasformatore”. La versione universalmente usata sui motori brushless è quella ad albero cavo (pancake), disponibile anche con il trasformatore sul lato di fissaggio del proprio statore a quello del motore per ridurre eventuali disturbi dovuti al campo magnetico del motore (questi possono comportare sia un funzionamento rumoroso dell’azionamento che un errore di posizione nel caso di comando del convertitore da parte di un controllore di moto). I segnali del resolver sono comunque alla frequenza di alimentazione degli avvolgimenti, ovvero attorno ai 10kHz. E’ necessario dunque operare una demodulazione, per estrarre il segnale utile. Sono universalmente adottati speciali convertitori (RDC – Resolver-to-Digital Converter) che operano la demodulazione e trasformano la posizione in un segnale digitale a 12, 14 o 16 bit già adatto per essere interfacciato con gli ingressi digitali di un microprocessore. Dai segnali del resolver si possono ricavare elettronicamente quelli di un encoder (encoder simulato) per gestire un posizionamento. Questo elemento di retroazione è molto robusto, sopporta molto bene anche notevoli sollecitazioni meccaniche e sopporta temperature fino a 120°C.
ENCODER
Gli encoder sono trasduttori di posizione angolare di tipo digitale, dispositivi nei quali la posizione angolare è quantizzata, cioè l’angolo di rotazione dell’albero mobile è suddiviso in un numero discreto di parti a ciascuna delle quali viene fatto corrispondere un segnale digitale. Esistono principalmente due tipi di trasduttori angolari con uscita digitale: l’encoder incrementale e l’encoder assoluto.
Encoder incrementale rotativo
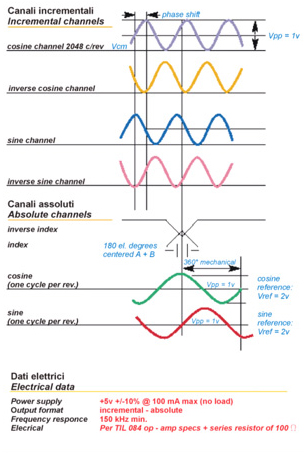
L’encoder incrementale rotativo è un trasduttore di posizione che genera uno o due treni di impulsi (versione mono o bidirezionale), sinusoidali, caratterizzati da un certo numero di impulsi per ogni angolo giro dell’albero (risoluzione dell’encoder). In aggiunta può generare per ogni giro un impulso supplementare, detto zero o di riferimento. In particolare, per abbinamento come trasduttore primario a convertitori per servomotori sincroni, gli encoder forniscono ulteriori segnali, detti di commutazione, per il rilevamento assoluto della posizione rotorica del motore all’atto dell’inserzione dell’alimentazione; dopo l’inserzione, l’elaborazione interessa i segnali incrementali, trattandoli con tecniche d’interpolazione per ottenere una risoluzione (passi al giro) molto elevata. Nel caso di encoder sinusoidale, i segnali di commutazione sono costituiti da due segnali seno-coseno da un periodo al giro. All’albero cavo dell’encoder è solitamente fissato un disco di materiale trasparente dotato di piste circolari opportunamente fotoincise. La superficie del disco è illuminata da fotodiodi, in modo che le zone opache in movimento intercettino a tratti il fascio luminoso della sorgente. Dalla parte opposta ai fotodiodi sono collocati i fotransistori di rilevazione; questi trasformano il segnale luminoso modulato in segnale elettrico con forma d’onda sinusoidale. Per non danneggiare il disco ottico interno, specie se in vetro (impulsi/giro > 1000) sono rigorosamente da evitare urti dell’encoder e lavorazioni, pressioni o flessioni del relativo alberino. Gli encoder con segnali incrementali e di commutazione sinusoidali sono contraddistinti da:
- frequenza operativa 500 kHz
- segnali incrementali fino a 4096 impulsi / giro
- temperatura operativa da -10°C fino a +120°C
- massima velocità di rotazione 12.000 giri / minuto
- stadio elettronico d’uscita LINE DRIVER
- albero cavo
- fissaggio flessibile tramite molla a lamina per compensare allungamenti termici dell’albero motore ed eventuali lievi disassamenti.
Per la scelta della risoluzione dell’encoder bisogna considerare che il numero di periodi al giro, disponibile a valle della moltiplicazione elettronica (interpolazione), sia tale da consentire una precisione di posizionamento da due a quattro volte superiore a quella richiesta dall’applicazione specifica e che questa può arrivare a dieci nel caso di macchine utensili per la lavorazione dei metalli.
Encoder assoluto rotativo
L’encoder assoluto si avvale di uno o più dischi (versione monogiro o multigiro) con varie piste circolari (una per ogni bit di risoluzione) codificate in binario o il Gray. Rispetto alla versione incrementale presenta il vantaggio di richiedere un punto di riferimento (punto di zero) per ottenere la posizione assoluta, disponibile in formato parallelo o seriale, necessaria al controllo diretto di posizione dell’organo mobile finale della macchina. Poiché, in caso di controllo indiretto di posizione, l’encoder assoluto viene integrato nel motore brushless, il relativo disco è dotato di ulteriori piste che generano i segnali incrementali sinusoidali da 1 Vpp necessari alla commutazione del servomotore; viene così a ridursi il numero di trasduttori ed il costo dell’applicazione. In sintonia con le odierne tecnologie digitali, il formato di trasmissione della posizione assoluta è di tipo seriale. Quello di trasmissione dei segnali incrementali di commutazione è invece di tipo parallelo per due ragioni:
- tramite interpolazione si può ottenere una risoluzione nettamente migliore di quella fornita dalle piste assolute del disco dell’encoder
- questa elevatissima risoluzione non è compatibile, in relazione alla necessaria dinamica di controllo, con le tempistiche della trasmissione seriale.
Nei motori R.C.V. è installabile l’encoder assoluto rotativo con interfaccia seriale sincrona RS 485 bidirezionale EnDat (Heidenhain).
ULTRACT
PAGINE CORRELLATE
ULTRACT
SCHEDE TECNICHE
COME RAGGIUNGERCI
a RobassomeroLa R.C.V. ha sede nella zona industriale di Robassomero, comune della seconda cintura di Torino.
Arrivando dalle autostrade di Aosta (A5) e di Milano (A4) occorre imboccare la tangenziale di Torino in direzione sud, arrivando dal Frejus (A32), da Piacenza (A21) o da Savona (A6) occorre dirigersi verso nord.
Uscire a “Venaria – stadio” e svoltare al semaforo a sinistra, direzione Lanzo.
Attraversare l’abitato di Venaria e percorrere la S.P. N° 1 per circa 8 km, si costeggia il muro perimetrale del Parco Regionale della Mandria, fino al semaforo della zona industriale di Robassomero.
Svoltare a destra, quindi alla prima via nuovamente a destra, questa è v. Cavour.